![]()
![]()

2015年04月09日 更新
当社は、福島県の「災害対応ロボット産業集積支援事業」に採択された(2014.8.27. ニュースリリース)「災害対策用遠隔操作インタフェース“ロボットスーツHALマスタ”および自走型双腕ロボットの研究開発」の成果を、発表しました。「災害対応ロボット産業集積支援事業」は、東日本大震災により発生した原子力事故の影響を受けた市町村を中心に、福島県の復興促進を目的として実施されるものです。
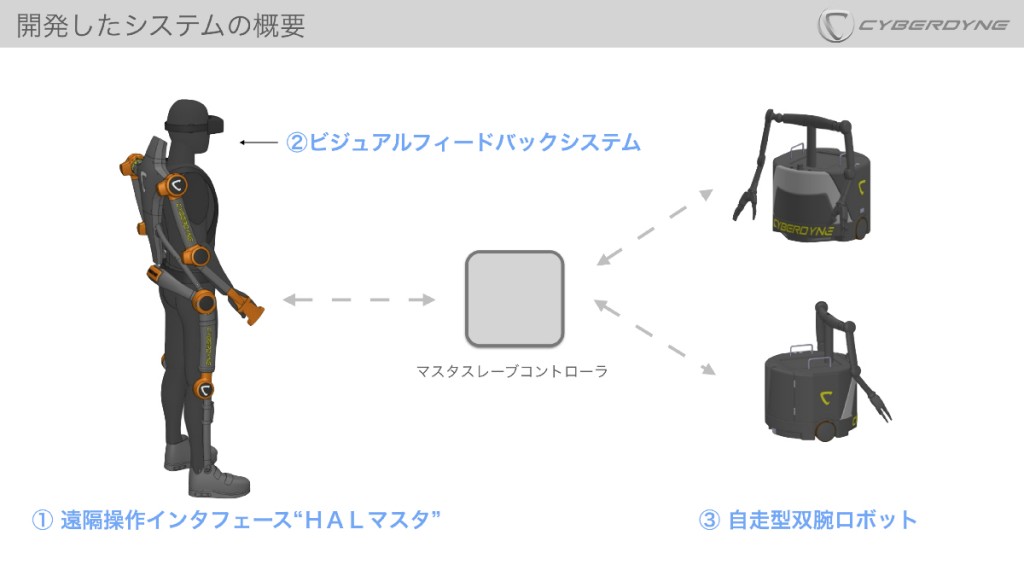
災害発生時においては、オペレータの安全を確保しながら早期の応急復旧やインフラ整備を行うために、遠隔操作システムの導入が望まれております。それには、「操作性・作業性、複数の機器間における協調性、作業効率」が重要になります。それらを解決するため、以下の3点につき技術確立致しました。
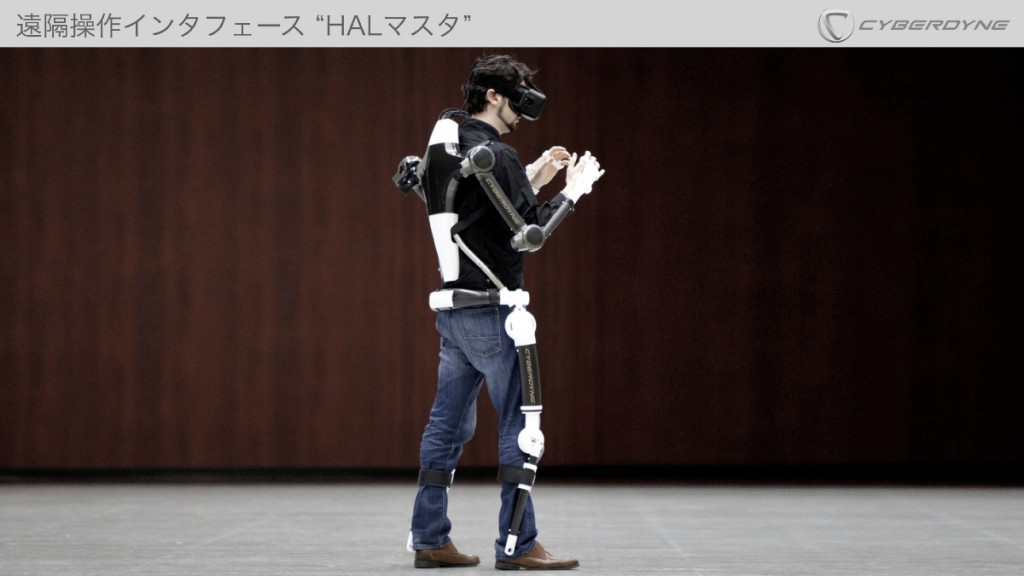
① ロボットスーツHALの技術を応用した、オペレータへ感覚フィードバックを与えることのできる災害対策用遠隔操作インタフェースHALマスタの開発
② 遠隔地の情報を適切にオペレータへと伝達し、オペレーションのアシストを行うビジュアルフィードバックシステムを開発
③ 復旧を想定した繊細な作業が行える作業用ハンドを付加した自走型双腕ロボットの開発および基本運用システムの構築
当社は今後、システムを組み合わせ、検証・評価試験、現場での実証試験を通して、実用化研究を引き続き進めて参ります。
CYBERDYNE
ABOUT US
© 2026 CYBERDYNE INC. ALL RIGHTS RESERVED.